[ad_1]
The concept of
intelligent roadways is not new. It includes initiatives like targeted traffic lights that immediately adjust their timing based on sensor data and streetlights that immediately alter their brightness to cut down energy usage. PerceptIn, of which coauthor Liu is founder and CEO, has shown at its personal exam track, in Beijing, that streetlight control can make site visitors 40 p.c much more economical. (Liu and coauthor Gaudiot, Liu’s previous doctoral advisor at the College of California, Irvine, generally collaborate on autonomous driving jobs.)
But these are piecemeal adjustments. We propose a a lot far more formidable method that brings together smart roadways and clever motor vehicles into an integrated, entirely clever transportation program. The sheer amount and accuracy of the combined info will allow for these a process to attain unparalleled degrees of security and effectiveness.
Human motorists have a
crash level of 4.2 accidents for each million miles autonomous autos have to do substantially greater to get acceptance. Even so, there are corner situations, such as blind spots, that afflict each human motorists and autonomous automobiles, and there is at present no way to cope with them without the need of the help of an clever infrastructure.
Placing a great deal of the intelligence into the infrastructure will also lower the cost of autonomous automobiles. A totally self-driving motor vehicle is however fairly high priced to create. But little by little, as the infrastructure gets to be additional powerful, it will be doable to transfer more of the computational workload from the motor vehicles to the streets. At some point, autonomous cars will want to be geared up with only standard perception and command capabilities. We estimate that this transfer will reduce the price tag of autonomous vehicles by extra than 50 percent.
Here’s how it could get the job done: It’s Beijing on a Sunday morning, and sandstorms have turned the solar blue and the sky yellow. You are driving by means of the town, but neither you nor any other driver on the road has a apparent point of view. But each individual vehicle, as it moves along, discerns a piece of the puzzle. That information, merged with information from sensors embedded in or around the highway and from relays from climate solutions, feeds into a distributed computing procedure that utilizes artificial intelligence to build a solitary product of the environment that can identify static objects alongside the highway as properly as objects that are moving along every car’s projected path.
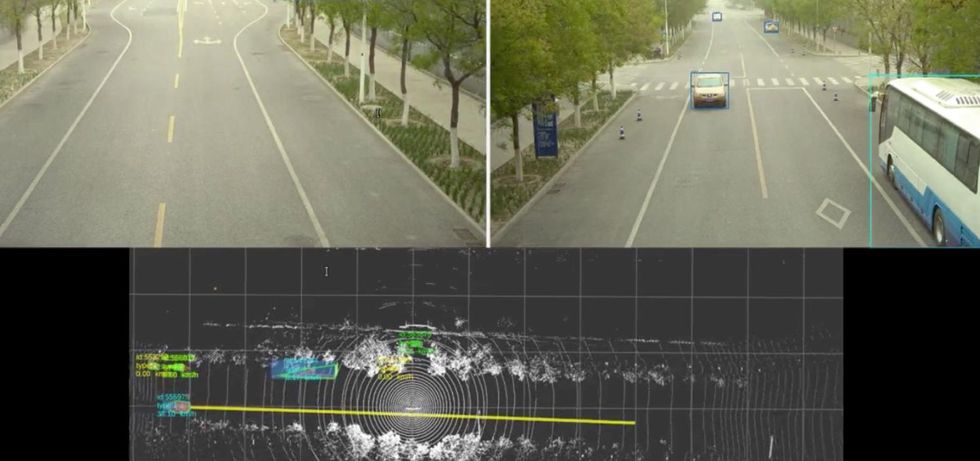 The self-driving auto, coordinating with the roadside program, sees right by a sandstorm swirling in Beijing to discern a static bus and a going sedan [top]. The system even signifies its predicted trajectory for the detected sedan through a yellow line [bottom], proficiently forming a semantic superior-definition map.Shaoshan Liu
The self-driving auto, coordinating with the roadside program, sees right by a sandstorm swirling in Beijing to discern a static bus and a going sedan [top]. The system even signifies its predicted trajectory for the detected sedan through a yellow line [bottom], proficiently forming a semantic superior-definition map.Shaoshan Liu
Thoroughly expanded, this technique can prevent most incidents and site visitors jams, troubles that have plagued road transport due to the fact the introduction of the vehicle. It can present the plans of a self-adequate autonomous car devoid of demanding much more than any 1 auto can deliver. Even in a Beijing sandstorm, just about every man or woman in every single automobile will arrive at their destination safely and on time.
By putting with each other idle compute electrical power and the archive of sensory data, we have been capable to improve overall performance with out imposing any extra burdens on the cloud.
To date, we have deployed a product of this procedure in a number of metropolitan areas in China as properly as on our take a look at keep track of in Beijing. For instance, in Suzhou, a city of 11 million west of Shanghai, the deployment is on a public street with three lanes on every side, with phase one particular of the job covering 15 kilometers of freeway. A roadside program is deployed every single 150 meters on the highway, and each roadside program is composed of a compute device geared up with an
Intel CPU and an Nvidia 1080Ti GPU, a collection of sensors (lidars, cameras, radars), and a conversation ingredient (a roadside unit, or RSU). This is due to the fact lidar provides far more correct perception in contrast to cameras, primarily at night time. The RSUs then talk right with the deployed autos to facilitate the fusion of the roadside information and the motor vehicle-side knowledge on the vehicle.
Sensors and relays alongside the roadside comprise one particular 50 percent of the cooperative autonomous driving procedure, with the components on the autos on their own making up the other fifty percent. In a typical deployment, our product employs 20 cars. Each individual motor vehicle bears a computing technique, a suite of sensors, an motor command device (European), and to join these parts, a controller space community (CAN) bus. The street infrastructure, as described earlier mentioned, is composed of very similar but extra sophisticated equipment. The roadside system’s significant-conclusion Nvidia GPU communicates wirelessly by using its RSU, whose counterpart on the car or truck is known as the onboard device (OBU). This back again-and-forth communication facilitates the fusion of roadside facts and vehicle info.
 This deployment, at a campus in Beijing, is made up of a lidar, two radars, two cameras, a roadside communication device, and a roadside computer. It addresses blind spots at corners and tracks relocating road blocks, like pedestrians and autos, for the profit of the autonomous shuttle that serves the campus.Shaoshan Liu
This deployment, at a campus in Beijing, is made up of a lidar, two radars, two cameras, a roadside communication device, and a roadside computer. It addresses blind spots at corners and tracks relocating road blocks, like pedestrians and autos, for the profit of the autonomous shuttle that serves the campus.Shaoshan Liu
The infrastructure collects facts on the regional ecosystem and shares it quickly with cars and trucks, thereby getting rid of blind places and in any other case extending perception in obvious means. The infrastructure also processes knowledge from its individual sensors and from sensors on the autos to extract the meaning, manufacturing what is termed semantic info. Semantic info may possibly, for instance, discover an object as a pedestrian and track down that pedestrian on a map. The benefits are then despatched to the cloud, in which much more elaborate processing fuses that semantic info with knowledge from other sources to deliver worldwide notion and scheduling details. The cloud then dispatches world targeted traffic info, navigation programs, and manage instructions to the cars.
Each and every motor vehicle at our check monitor begins in self-driving mode—that is, a amount of autonomy that today’s very best units can regulate. Every vehicle is outfitted with 6 millimeter-wave radars for detecting and monitoring objects, eight cameras for two-dimensional notion, 1 lidar for 3-dimensional notion, and GPS and inertial guidance to track down the motor vehicle on a electronic map. The 2D- and 3D-perception results, as nicely as the radar outputs, are fused to create a in depth perspective of the street and its immediate surroundings.
Next, these notion final results are fed into a module that retains keep track of of each and every detected object—say, a car, a bicycle, or a rolling tire—drawing a trajectory that can be fed to the upcoming module, which predicts in which the focus on item will go. Eventually, this sort of predictions are handed off to the planning and management modules, which steer the autonomous vehicle. The auto produces a design of its environment up to 70 meters out. All of this computation happens within the automobile by itself.
In the meantime, the intelligent infrastructure is carrying out the same position of detection and monitoring with radars, as properly as 2D modeling with cameras and 3D modeling with lidar, finally fusing that info into a model of its individual, to complement what every single auto is carrying out. For the reason that the infrastructure is distribute out, it can design the world as significantly out as 250 meters. The monitoring and prediction modules on the automobiles will then merge the broader and the narrower types into a comprehensive check out.
The car’s onboard device communicates with its roadside counterpart to aid the fusion of details in the auto. The
wi-fi regular, referred to as Mobile-V2X (for “vehicle-to-X”), is not in contrast to that employed in telephones communication can achieve as considerably as 300 meters, and the latency—the time it takes for a concept to get through—is about 25 milliseconds. This is the place at which many of the car’s blind spots are now coated by the program on the infrastructure.
Two modes of conversation are supported: LTE-V2X, a variant of the cellular standard reserved for automobile-to-infrastructure exchanges, and the industrial cell networks utilizing the LTE normal and the 5G typical. LTE-V2X is focused to direct communications in between the highway and the vehicles above a variety of 300 meters. Whilst the interaction latency is just 25 ms, it is paired with a small bandwidth, at the moment about 100 kilobytes for every 2nd.
In contrast, the professional 4G and 5G community have unlimited range and a noticeably larger bandwidth (100 megabytes for each next for downlink and 50 MB/s uplink for professional LTE). However, they have much higher latency, and that poses a important challenge for the instant-to-instant choice-producing in autonomous driving.
 A roadside deployment at a public road in Suzhou is organized alongside a eco-friendly pole bearing a lidar, two cameras, a communication unit, and a pc. It drastically extends the vary and protection for the autonomous autos on the road.Shaoshan Liu
A roadside deployment at a public road in Suzhou is organized alongside a eco-friendly pole bearing a lidar, two cameras, a communication unit, and a pc. It drastically extends the vary and protection for the autonomous autos on the road.Shaoshan Liu
Take note that when a car travels at a velocity of 50 kilometers (31 miles) for every hour, the vehicle’s halting length will be 35 meters when the highway is dry and 41 meters when it is slick. For that reason, the 250-meter notion assortment that the infrastructure allows offers the car or truck with a big margin of protection. On our test track, the disengagement rate—the frequency with which the basic safety driver should override the automatic driving system—is at least 90 p.c reduced when the infrastructure’s intelligence is turned on, so that it can augment the autonomous car’s onboard method.
Experiments on our exam observe have taught us two matters. To start with, mainly because website traffic situations improve all through the working day, the infrastructure’s computing models are fully in harness all through rush several hours but mostly idle in off-peak hours. This is more a feature than a bug mainly because it frees up substantially of the massive roadside computing electricity for other jobs, such as optimizing the method. Next, we find that we can without a doubt optimize the method simply because our expanding trove of nearby perception facts can be utilized to good-tune our deep-understanding products to sharpen perception. By putting collectively idle compute ability and the archive of sensory details, we have been equipped to enhance performance without having imposing any further burdens on the cloud.
It is really hard to get people to concur to build a broad technique whose promised added benefits will come only following it has been accomplished. To remedy this rooster-and-egg dilemma, we ought to carry on through a few consecutive phases:
Phase 1: infrastructure-augmented autonomous driving, in which the cars fuse vehicle-aspect perception details with roadside perception data to improve the basic safety of autonomous driving. Motor vehicles will nonetheless be seriously loaded with self-driving equipment.
Phase 2: infrastructure-guided autonomous driving, in which the cars can offload all the perception tasks to the infrastructure to cut down for every-motor vehicle deployment expenses. For security factors, primary notion capabilities will stay on the autonomous autos in circumstance communication with the infrastructure goes down or the infrastructure by itself fails. Cars will want notably significantly less sensing and processing hardware than in stage 1.
Stage 3: infrastructure-prepared autonomous driving, in which the infrastructure is billed with equally perception and planning, thus achieving highest safety, targeted traffic performance, and charge savings. In this stage, the vehicles are equipped with only extremely essential sensing and computing abilities.
Technological troubles do exist. The initially is network security. At higher vehicle velocity, the system of fusing car or truck-aspect and infrastructure-facet details is really delicate to community jitters. Making use of professional 4G and 5G networks, we have noticed
network jitters ranging from 3 to 100 ms, sufficient to efficiently protect against the infrastructure from supporting the car or truck. Even much more important is stability: We require to assure that a hacker are not able to assault the interaction network or even the infrastructure itself to go incorrect facts to the cars and trucks, with most likely deadly consequences.
One more trouble is how to achieve common help for autonomous driving of any form, let on your own just one primarily based on intelligent roads. In China, 74 per cent of folks surveyed favor the rapid introduction of automatic driving, whilst in other countries, general public assist is more hesitant. Only 33 p.c of Germans and 31 p.c of individuals in the United States assistance the swift enlargement of autonomous automobiles. Maybe the effectively-recognized car society in these two nations around the world has designed people today a lot more connected to driving their possess cars and trucks.
Then there is the issue of jurisdictional conflicts. In the United States, for instance, authority over roads is dispersed between the Federal Freeway Administration, which operates interstate highways, and point out and area governments, which have authority around other roads. It is not often obvious which amount of governing administration is accountable for authorizing, handling, and paying out for upgrading the latest infrastructure to intelligent roadways. In latest periods, a great deal of the transportation innovation that has taken area in the United States has happened at the neighborhood level.
By distinction,
China has mapped out a new established of actions to bolster the analysis and enhancement of critical systems for smart street infrastructure. A coverage document released by the Chinese Ministry of Transportation aims for cooperative methods among car or truck and street infrastructure by 2025. The Chinese governing administration intends to include into new infrastructure these types of sensible aspects as sensing networks, communications systems, and cloud command programs. Cooperation among the carmakers, significant-tech providers, and telecommunications company companies has spawned autonomous driving startups in Beijing, Shanghai, and Changsha, a metropolis of 8 million in Hunan province.
An infrastructure-motor vehicle cooperative driving tactic claims to be safer, more effective, and additional cost-effective than a strictly car-only autonomous-driving approach. The technological know-how is listed here, and it is remaining applied in China. To do the same in the United States and elsewhere, policymakers and the public must embrace the strategy and give up today’s model of car-only autonomous driving. In any situation, we will soon see these two vastly distinctive approaches to automatic driving competing in the earth transportation market place.
From Your Internet site Posts
Connected Article content About the World-wide-web